文|三少爷
不知道是不是因为电动汽车的渗透率来到了主流大众阶段,过去不太被先锋消费者所关心的底盘领域也开始了疯狂内卷。一个突出的表现就是在过去的几年中,很多车企都在智能底盘技术上投入了相当大的资源,并在2023年开始拿出系统化的解决方案。

2023年4月份,比亚迪推出“云辇”智能车身控制技术,在原有横纵向控制技术的基础上,补齐垂向控制的最后一块拼图,实现了对车身X-Y-Z 六个自由度的完整控制,在此基础上,进一步融合高阶智驾感知传感器的能力,实现了道路预瞄功能。后来,在智界S7发布会前后那段时间,华为推出了“途灵底盘”,同样通过多模态融合感知和多域协同控制技术,实现了对驱动、制动、悬架和转向的多维控制。

这两家技术方案的主要亮点一方面体现在,在原有横纵向控制的基础上加入了垂向控制,实现了对车辆的立体控制。另一方面体现在通过感知传感器实现了对前方道路的扫描。值得一提的还有蔚来汽车Banyan·榕2.4.0 智能系统中的“AI智能底盘”,除了利用车端的感知传感器(激光雷达和摄像头)扫描前方路面,蔚来汽车还通过群体智能的方式生成了4D路况图层,进一步增强了对路面的云端感知能力。
稍微总结一下就会发现,感知能力的进步是这几家车企推出的智能底盘技术区隔于老一代底盘技术最为鲜明的亮点。
更强大的车端融合感知
在当前智能底盘技术的框架里,感知传感器(感知路面信息)和底盘传感器(感知车身姿态)是感知层两大重要硬件。感知决定了高阶智驾的性能,对路面状况和车辆状态的感知能力高低也同样决定了智能底盘的表现。
早期,BBA的智能底盘依靠摄像头扫描前方路面的颠簸。摄像头的技术特性大家都清楚,在以特斯拉为首的纯视觉技术路线派和以华为为首的多传感器融合技术路线派的争论里,摄像头的劣势被一次次拿出来吊打。在天气和光线良好的情况下,摄像头可以通过道路纹理信息判断前方是凸起还是坑洼,但天气不佳或者光线变差时,路面感知的清晰度就成了智能底盘系统表现的瓶颈。
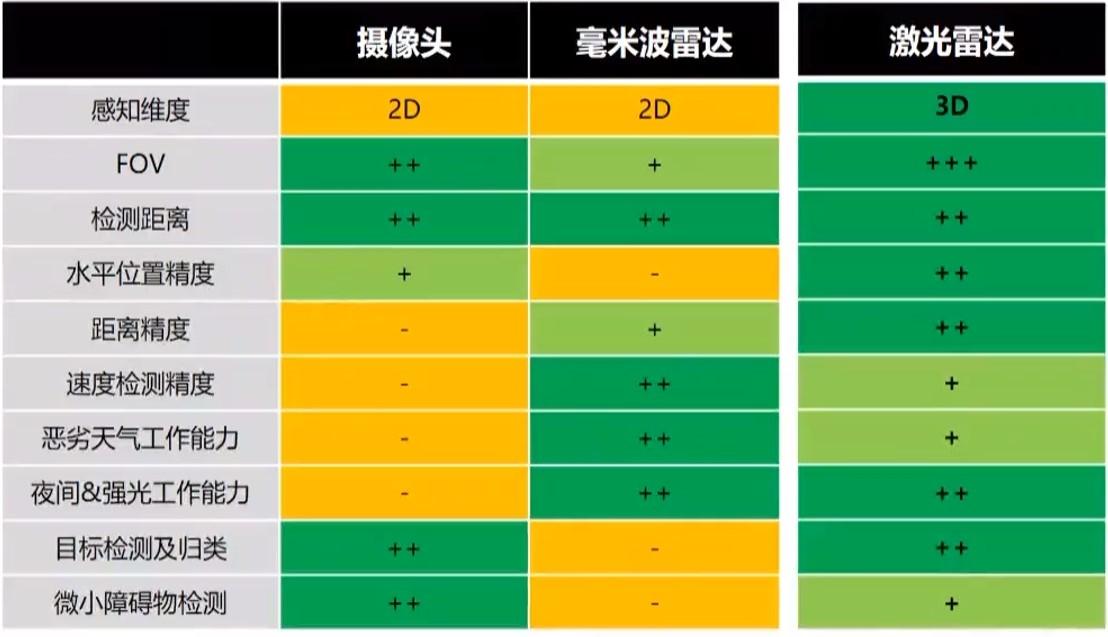
图片来源:速腾聚创
在夜间和强光条件下,摄像头变成了睁眼瞎,基于这样的特点,比亚迪和华为引入了可有效应对强光、暗光、炫光、逆光等各种光照条件的激光雷达。通过激光雷达无惧恶劣天气和光线的3D几何信息和摄像头丰富的纹理信息,判断前方路面的凹凸,系统表现的理论上限肯定超过“纯视觉派”。不过,想用好激光雷达实在是太难了,那些把激光雷达蒙上还能“开启”高阶智驾功能的车企,以及那些基于激光雷达信息融合实现城区高阶智驾功能的车企对这一点有非常深刻甚至是痛切的认识。

不过,尽管激光雷达有面对恶劣光线条件的独特优势,激光雷达+摄像头的实时路面感知也不是完全没问题。雨雾、水滴很容易造成激光雷达的伪影,一下子就能把“眼睛的视力”从5.0拉到3.0,即便是天气状况良好,传感器沾上污点,也会拉低感知性能的表现。
困难摆在这里,是解决它还是绕开它?很多人对此是有不同看法的,“稍微颠簸一下怎么了,人哪有那么金贵?”但是,一向致力于把美好的体验带给大家的蔚来,摸索出了一条新的解决方案-加入道路的先验信息,蔚来把它称为4D路况图层。
更准确的云端融合感知
也许是为了区隔华为、比亚迪正着力宣传的智能底盘,避免以后发劣势加入用户心智之争,又或许是为了突出技术方案的与众不同之处,蔚来引入了“AI智能底盘”的概念。

图片来源:蔚来汽车
在某种程度上,这确实属于“行业首创”,因为,从技术特点上来看,蔚来智能底盘技术在车端融合感知的基础上加入了云端融合感知。不过,这里有一个值得思考的问题:还是同样采用摄像头和激光雷达,摄像头和激光雷达的技术特性摆在那里,为什么蔚来的AI智能技术方案能够有效地弥补感知传感器在雨雪天气下的缺陷,提供更加鲁棒的感知能力?
答案是,除了利用摄像头和激光雷达对路面信息进行实时感知之外,蔚来还可以根据汽车多次(只需要四次)行驶过相同路段时的车身状态传感器对路面的颠簸情况进行确认、验证、微调、修正。如果说车端的单次实时感知是对路面状况的“大胆假设”的话,那么,蔚来在云端重新计算并精细调整路面颠簸信息便是“小心求证”,相对于单次的大胆假设,四次确认可以保证更高的数据准确性。而且,不只是对激光雷达和摄像头感知信息的求证,在车辆实际行驶到该路段时,通过底盘传感器还可以再次更正或确认路面信息。

在友商的实时感知方案中,车开过去就开过去了,车身高度、加速度等传感器感知到的信息“阅后即焚”,不会用于改善下一次通过相同路段的行驶表现。雁过虚空了无痕,无法利用底盘传感器的信息,就像一只大雁飞过天空那样没有留下任何痕迹,存储上倒是干干净净地没啥负担,但价值就隐藏在数据里面,不挖掘一下岂不可惜?
所以,可以认为,蔚来通过感知传感器(摄像头和激光雷达)“着眼未来”,借助底盘传感器“立足当下”,两相结合,充分挖掘数据价值并四次确认之后,便可以生成更加准确地反映路面颠簸情况的云端感知路况图层了。
写在最后
通过路面扫描提升驾驶的通过性、平顺性和舒适性,市面上能够做到这一点并重点宣传的车企并不多。本土车企这边,比亚迪、华为和蔚来是三家比较典型的车企,其它车企可能是智驾算力有限,又或许是产品定义问题(能提供这种功能体验的车型基本都在25万以上),暂时没有释放这种能力。
而且,在这三家里面,作为后来者的蔚来做出了差异化的方案。如前所述,比亚迪和华为更加注重实时感知,蔚来则叠加了通过群体智能生成的4D路况图层,在实时感知的基础上提供道路先验信息,在理论上具备更高的性能天花板。当然,天花板是一回事,实际表现是另外一回事,这三家的实际表现对比,只能慢慢观察了。
值得一提的是,蔚来之所以能够另辟蹊径,离不开当初拍板选用四颗Orin芯片的决定。对于蔚来使用四颗Orin的做法,业界一直有一个调侃,“花了用户更多的钱,耗了用户更多的电,为啥不能提供更出色的高阶智驾表现?”蔚来NOP+的表现也许和小鹏、华为这俩头部厂商还有一定的差距,但和其它友商相比至少是不差的。而且,谁说Orin的算力只能局限在高阶智驾功能上面的,这不还能用在4D路况图层的生成和AI智能底盘上面吗?所以,至少在友商们把蔚来的本事学去(或许只能等英伟达下一代雷神芯片了)之前,能不能不要再喷蔚来干嘛非得用四颗Orin芯片了?


 粤公网安备 44010602000157号
粤公网安备 44010602000157号
